
Our custom-built replacement for the DAF66-12B12 preserves all the original 4–20 mA absolute output characteristics while offering optional adaptations for shaft, connector, or mounting requirements. The production cycle is 15 working days, allowing clients to overcome procurement or discontinued model challenges efficiently.
This encoder is designed for industrial environments requiring stable current-loop feedback and precise position measurement. Its robust construction supports extended use under vibration, variable temperatures, and long cable installations. The solution has already been deployed internationally, recognized for its reliability, economic value, and rapid delivery.
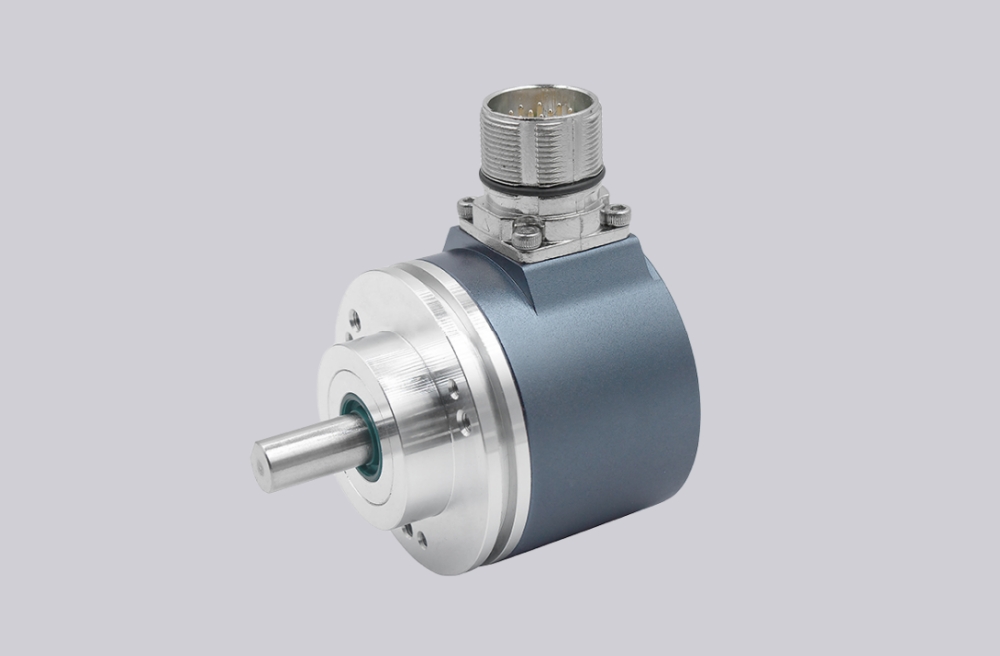
Reference Images

Electrical data
| Parameter | Value |
| Valid for all versions | Unless otherwise stated |
| Sensor system: | GaAIAs diode, photo-transistor array, precision comparator |
| Setting cycles EEPROM: | ≥10^6 |
| Multifunctional inputs (MFP): | Depending on adjusting mode (signal input E6) |
| Memory circuit (latch): | Through MFP |
| Disc coding: | Gray code |
| Signal sense: | CW or CCW (signal input E6) |
| Supply voltage range V_s: | +20 to +26 VDC, 15±0.5VDC(optional) |
| Supply current I_s: | 80 mA typ. / 120 mA max. (when output current = 0) |
| Linearity: | 0.025% typ. / 0.05% max. (+2 LSB), 12 Bit monotory warranted |
| Temperature drift: | 0.0015% / K typ. |
| Current output | |
| Accuracy | |
| at starting point 0 mA: | 0 mA ±5 μA typ. / ±15 μA max. |
| at end point 4 mA: | 4 mA ±5 μA typ. / ±15 μA max. |
| Load resistance: | 0 to 500Ω at V_s = 20 to 26 VDC, 0 to 1000Ω at V_s = 22 to 26 VDC |
| Voltage output | |
| Accuracy | |
| at starting point 0 V: | 0 V ±2.5 mV typ. / ±7.5 mV max. |
| at end point 10 V: | 10 V ±2.5 mV typ. / ±7.5 mV max. |
| Output current: | 5 mA max. When load resistance > 2 kΩ (short circuit proof) |
Disclaimer:
All content on this site is original unless otherwise noted. Copying, collecting, or publishing any material without our permission is prohibited. If any content infringes on copyright, please contact us.

